Tracking and Counting
Overviews
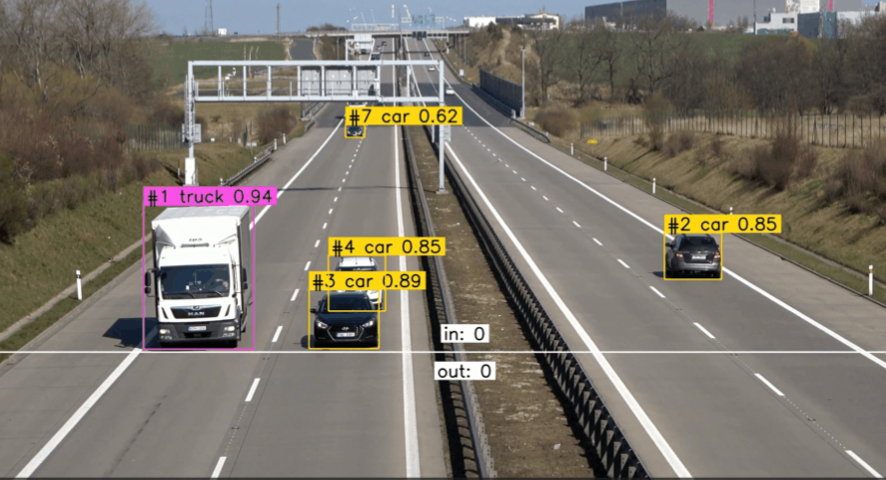
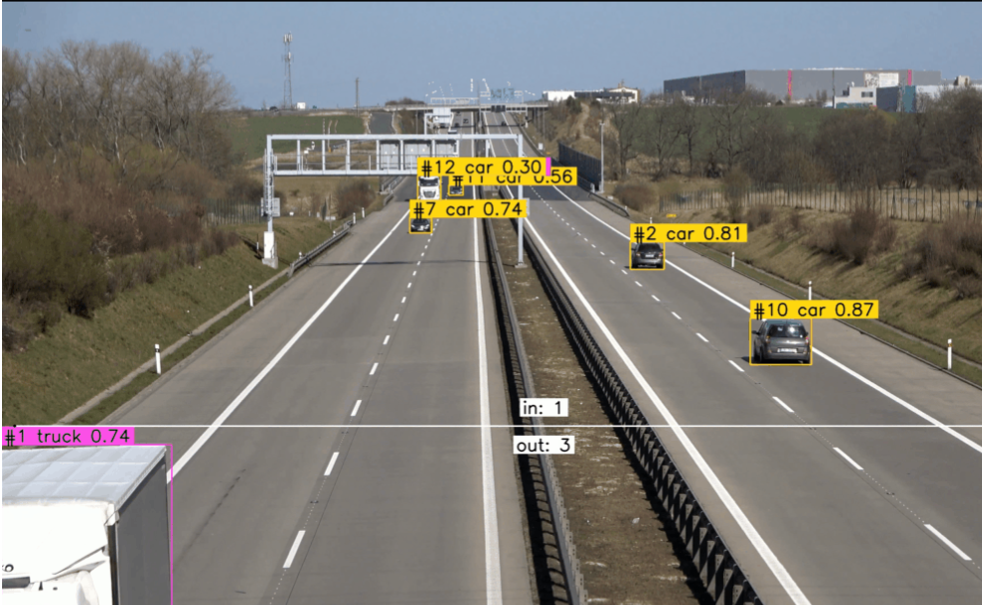
Using YOLOv8 to Tracking and Counting:
- With a line it is possible to count in and out against that line.
- Or with a region, it is possible to count the objects in the selected area
Install requirement
Please install ecos-core before
install bytetrack
pip install git+https://github.com/ifzhang/ByteTrack.git
pip install loguru lap onemetric
pip install supervision==0.9.0
install cython_bbox:
for ubuntu:
pip install cython_bbox
Note*: for windows
pip install -e git+https://github.com/samson-wang/cython_bbox.git#egg=cython-bbox
Usage
python predict.py --opt "<PATH_TO_OPT_FILE>" --weight-path "<PATH_TO_WEIGHT_FILE>" --input-path "<PATH_TO_INPUT_VIDEO>" --output-path "<PATH_TO_OUTPUT_VIDEO>"
PATH_TO_OPT_FILEis path to file opt.jsonPATH_TO_WEIGHT_FILEis path to fileyolov8<version>.ptPATH_TO_INPUT_VIDEOis path to Input videoPATH_TO_OUTPUT_VIDEOis path to output video
Example with video:
python predict.py --opt opt.json --weight-path yolov8x.pt --input-path vehicle-counting.mp4 --output-path out.mp4
Example with camera:
python predict.py --opt opt.json --weight-path yolov8x.pt --is-camera --output-path out.mp4 --show
- Content of opt.json like this:
{
"data": "data.yaml",
"task": "detect",
"imgsz":640,
"batch_size": 4,
"epochs": 20,
"version":"x",
"save": false,
"device": "0",
"classes_filter": [0],
"polygon_zone": [[150, 10], [150, 700]],
"thickness": 2,
"text_thickness": 2,
"text_scale": 1,
"camera_resolution": [1280, 720]
}
With:
classes_filter: is the array containing the class index to filter. If use default model from YOLO, class_index set based on COCO class. Example:0is person.polygon_zone: is the array containing point to define zone count. To define a line,polygon_zone: "[[x1,y1]", "[x2,y2]]", with "[x1, y1]", "[x2, y2]" are the coordinates of the start and end points. Or a region is a set of many points.thickness,text_thickness,text_scaleare value to draw text and line.camera_resolutionis the array containing the resolution of the camera [width, height]